请输入关键字
确定
top
首页
产品
MoRo S 防疫巡检机器人
Actuatic关节伺服电机
维度机器人操作系统
Dr. CaRo 维度康健机器人
MoRo Ⅱ 智能机器人
MoRo L 智能盘点机器人
Heptarm 七自由度机械臂
Tyran 运动底盘
Hexapod 六足机器人
Dr CaRo健康服务平台
解决方案
教育解决方案
健康解决方案
新闻
关于我们
下载与支持
加入我们
商务合作
Hexapod 六足机器人
多足仿生机器人开发平台
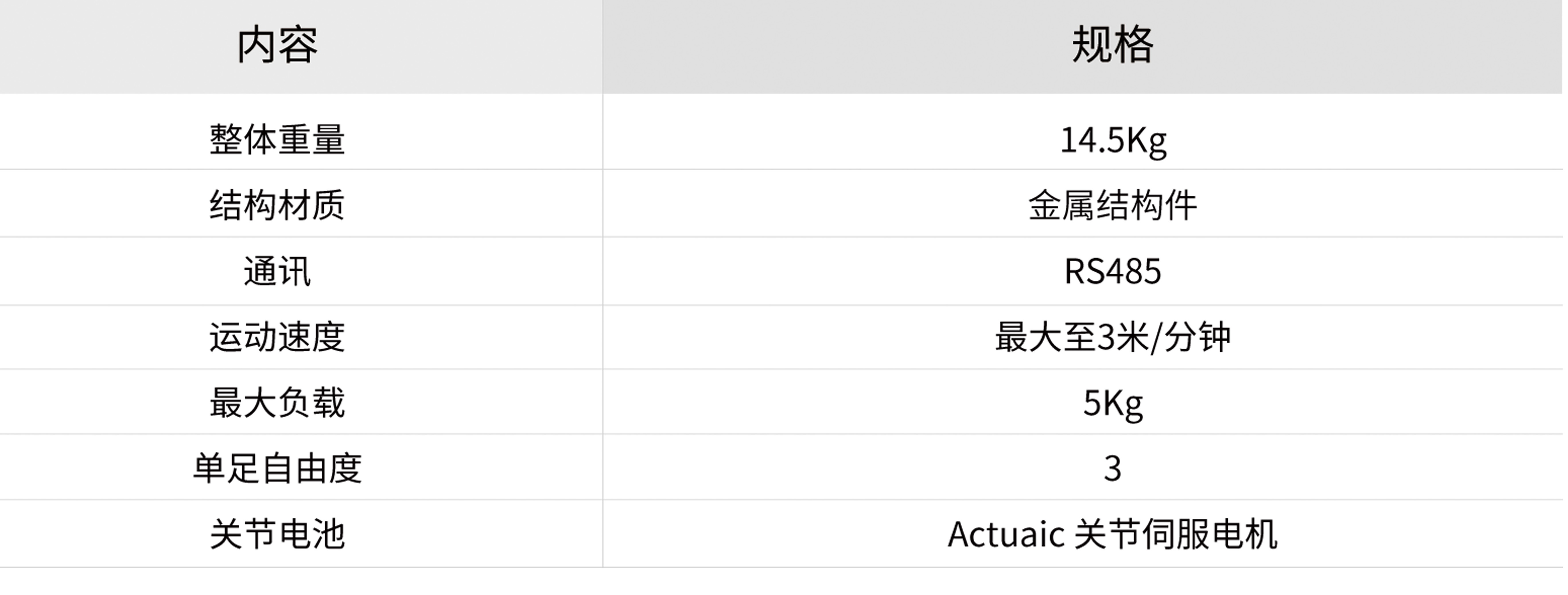
产品由Actuatic关节伺服电机和金属构件搭建而成,可自主运动。其腿部数量可根据科研教学需要增减,仿生昆虫运动步态,每个运动足有三个运动关节,每个关节由一个电机驱动。产品主要应用于各高校在运动学、结构学、控制学等机器人相关专业进行实践教学。
技术参数
核心动力
一维弦科技全自主知识产权的机器人关节伺服电机模块,是机器人手臂及其他运动关节的动力单元,是智能机器人的核心零部件。
维度机器人操作系统
专为智能机器人开发及二次设计而生
开放兼容、运行高效、功能强大
内含原生算法库
教学开发套件
提供教学及开发套件MoRo Studio,并有详细的使用说明文档以及参考范例,易学、易用、提高教学和二次开发的效率。
志愿者服务
2018秋集
微博
内含大量原生算法库
交通地理